

1. 서 론
2. 국외 TBM 운전 시뮬레이터 개발 현황
2.1 독일 Herrenknecht사 이렉터 시뮬레이터
2.2 미국 CSM과 Robbins사 시뮬레이터
2.3 프랑스 Bouygues Travaux Public사 시뮬레이터
2.4 스페인 Universidad Carlos III de Madrid 시뮬레이터
2.5 ITA-CET TBM 운전자 인증 제도
3. 국내 TBM 운전 시뮬레이터 개발 현황
3.1 시뮬레이터의 시스템구성과 하드웨어
3.2 LMS와 시나리오 개발
4. 결 론
1. 서 론
TBM(Shield Tunnel Boring Machine)공법은 도심지에서 하저터널 및 유틸리티터널 공사에 주로 이용되었지만, 최근 수도권광역급행철도(GTX) 및 수도권 제2순환고속도로(김포-파주 2공구) 등의 사례에서 알 수 있듯이 하해저에 한정되지 않고 있으며, 또한 직경이 10 m 이상으로 커지면서 좀 더 넓은 조건에서의 활용이 예상된다.
국내 인구구조의 변화로 인하여 생산가능인구가 감소되고 건설업의 열악한 근로환경에 기인하여 건설현장에 청년층 유입과 숙련 노동자가 줄어들고 있다. 이에 따라 건설 품질 저하는 물론 사고위험이 증가하고 있다. 통계청의 2008년부터 2015년까지의 자료에 의하면, 건설 분야 근로자 중 청년층(15~29세)의 유입은 지속적으로 감소하고 장년층(55세 이상)의 비율은 보다 빠르게 증가하여 건설업은 전 산업 평균에 비해 빠른 속도로 고령화가 진행되고 있다. 또한 2014년 건설산업연구원 설문조사 결과에 따르면, 근로자와 사업자 10명 중 8명 이상은 ‘숙련인력이 부족하다’고 응답했고, 근로자 83%와 사업자 78%가 숙련인력이 없어졌거나 앞으로 없어질 것으로 우려하고 있다(Shim, 2015)
기술훈련을 위해 사용하는 훈련 시뮬레이터는 실물 이용 시 발생되는 경제적 또는 실용적인 문제를 해결하기 위해 항공기, 자동차, 철도분야 등에서 널리 사용 중인 모의제어장치라고 할 수 있다. 대표적인 항공기 조정 시뮬레이터의 경우, 실물 항공기의 조종석을 모사하고 연수생(trainee)이 버튼, 스위치, 레버를 작동하면 항공기의 외적 환경요인에 따라 기체의 변화를 계산하여 계기판에 보여준 다음, 연수생은 계기판에 기반하여 다음 행동을 취하게 되며, 최종적으로 시뮬레이터에 기반하여 연수생의 교육과 평가가 이루어지게 된다.
TBM 분야에서도 시뮬레이터의 활용이 증가하고 있다. 독일의 Herrenknecht사는 TBM 터널의 지보재인 세그먼트(segment)를 설치하는 이렉터(erector)에 대한 시뮬레이터를 개발하여 홍보하고 있으며, 미국의 Colorado School of Mines(CSM)에서 진행되는 터널 교육과정에서는 EPB TBM 시뮬레이터을 이용하여 터널 막장압 및 지반변형 관리와 굴진속도 관리를 교육하기 위한 프로그램을 운영하고 있다(Chorley, 2017, Home et al., 2017, Herenknecht, 2018).
또한 스페인의 Universidad Carlos III de Madrid에서는 마이크로 터널링 장비를 대상으로 운전자의 훈련과 장비운영에 대한 데이터 수집 및 분석이 가능한 시뮬레이터를 개발하였으며, 프랑스의 Bouygues Travaux Public사에서는 Computer Based Training(CBT)타입의 TBM 시뮬레이터인 “THALIA”를 개발하였고 TBM 운전자를 육성한 실적을 가지고 있다. 이 시뮬레이터는 2019년 ITACET training course에서 소개된 바 있다(Jardόn et al., 2012, Herr, 2019).
본 연구에서는 국외의 TBM 시뮬레이터 개발현황에 대해 알아보고 국내에서 진행되고 있는 TBM 시뮬레이터의 현황을 살펴보았다.
2. 국외 TBM 운전 시뮬레이터 개발 현황
TBM은 공장규모의 부품과 설비가 모여 지하에서 지반을 굴진하는 장비이다. TBM 운전자는 오퍼레이팅 패널(operating panel)에 표시되는 기계데이터, 즉 힘, 압력, 토크, 온도와 같이 TBM의 각 부품과 설비에 설치되어 관련 상황을 보여주는 센서 데이터를 확인하면서 TBM의 기계사양 내에서 조작한다.
운전자는 기계를 이용한 지반굴착에 대한 이해, 기계부품과 전기, 유압에 대한 지식을 가지고 있어야 하고 이를 기반으로 TBM 부품과 설비의 작동/운전/종료를 수행해야 한다. 근래의 TBM은 제작사에서 인터록(interlock) 조건의 설정으로 장비에 문제가 발생하지 않도록 사전조치를 취하고 있지만, 장비 전반에 대한 이해가 필수적이라고 할 수 있다.
TBM 장비를 이용한 시공 중 발생하는 시공문제 특히 지반침하와 같은 사항은 TBM 장비 또는 장비운영에 의한 문제인지 여부를 떠나서 터널공사 전반에 안 좋은 평판을 주게 된다. 물론 잘못된 장비 사양의 설계에 의한 것일 수도 있지만, 지반침하와 같이 시공 중에 발생하는 문제의 많은 부분이 운전자의 잘못된 운전습관에 따른다. 따라서 장비를 운용하는 운전자의 교육은 반드시 필요하다. 본 연구에서는 먼저 국외의 시뮬레이터를 이용한 장비운용 교육을 살펴보았다.
2.1 독일 Herrenknecht사 이렉터 시뮬레이터
세그먼트는 쉴드 TBM터널의 주요 지보재로써 굴진작업 후 여러 개의 세그먼트를 조립하여 하나의 링을 형성한다. 세그먼트 조립(ring building)을 위해 여러 개의 세그먼트를 설치하는 작업은 시간이 소요되는 작업이다. 따라서 빠르게 다음 굴진 작업을 수행하기 위해서는 세그먼트의 이송과 설치가 신속해야 한다. 이렉터를 이용하여 수 톤의 세그먼트를 파손없이 설정된 위치에 정확하게 설치하기 위해서는 이렉터를 정밀하게 다룰 수 있어야 한다. 세그먼트 설치작업의 신속성은 이렉터 운전자의 전문성이 큰 영향을 미친다.
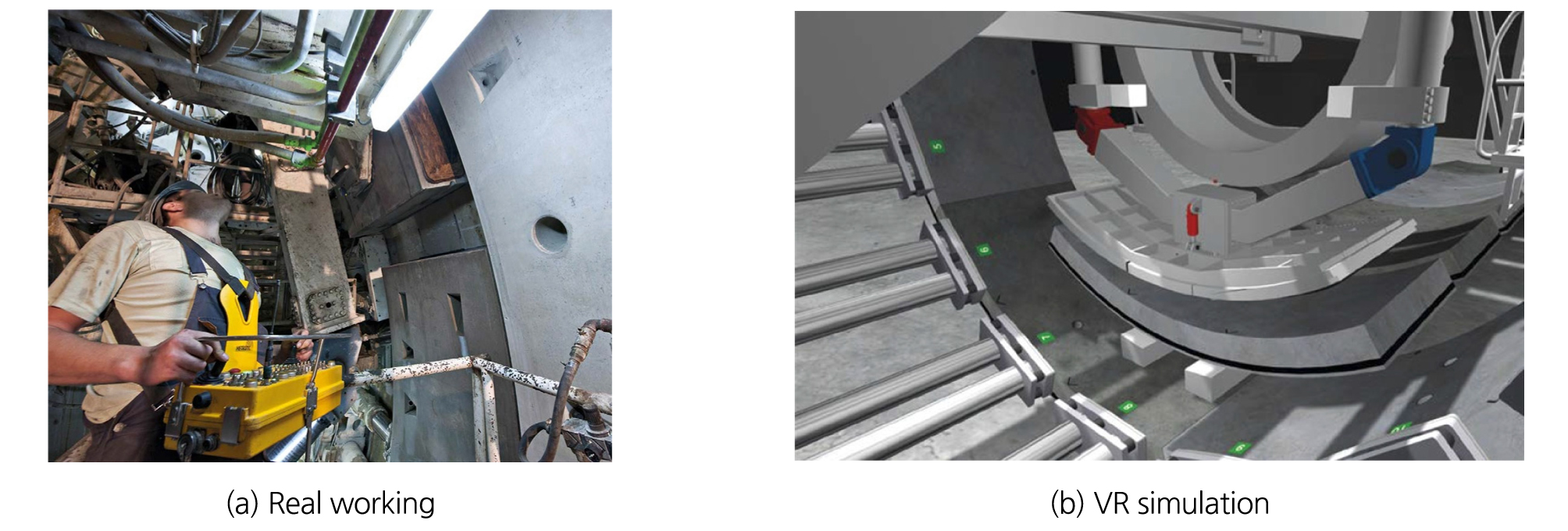
Herrenknecht사에서는 이렉터 작업자가 훈련을 통해 세그먼트 작업에서의 시간과 비용을 절약할 수 있도록 Fig. 1과 같이 가상현실(virtual reality)을 적용한 시뮬레이터를 개발하였다. 이 시뮬레이터는 실제 TBM 현장 조건에 맞춘 프로젝트별 시뮬레이션 환경을 제공하며, 운전자가 이렉터 컨트롤 패널 상의 조이스틱을 조작하여 이렉터의 3차원 동작과 속도조절에 대한 기술을 향상시킬 수 있도록 도와준다. 또한 시뮬레이션을 통해 자유도(degrees of freedom) 조작 및 추력 실린더(thrust cylinders), 세그먼트 피더(segment feeders), 진공흡입판(vacuum suction plate)에 대한 각각의 훈련을 할 수 있다.
이렉터 시뮬레이터는 런던 Cross Rail Project에 참여한 건설회사들이 TBM 8대의 이렉터를 운용하기 위해 필요한 인력교육을 위해 사용한 바 있다(Herrenknecht, 2018).
2.2 미국 CSM과 Robbins사 시뮬레이터
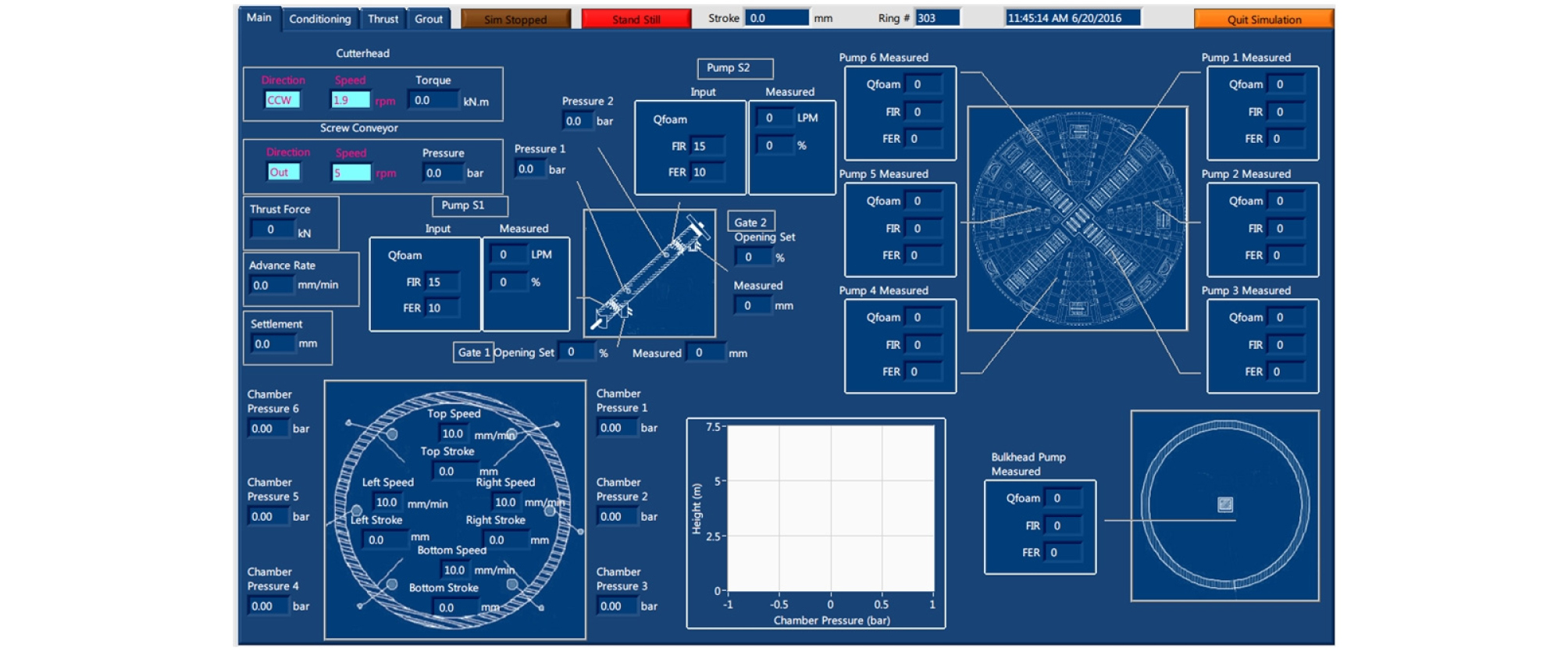
Chorley(2017)는 미국 Robbins사와 Colorado School of Mines(CSM)가 협력하여 시뮬레이터를 개발하고 있으며, CSM에서 개발된 EPB TBM Simulator를 운전자의 훈련과 인증에 활용하고 있다고 하였다. 이 시뮬레이터는 PC 단독으로 실행될 수도 있고, 실제 장비의 실제 TBM장비의 오퍼레이션 룸(operator cab)의 시스템과 연결하여 사용할 수 있다(Fig. 2). 현재 다섯 가지의 시나리오가 개발되었으며, 각 시나리오 내에서 굴착(excavation)과 세그먼트 조립 동안의 TBM 운전에 초점을 맞추고 있다. 세그먼트 조립 및 정지(stand still)조건에서의 시뮬레이션은 지반조건에 따라 챔버압(chamber pressure)의 조절에 관련된다. 다음은 CSM의 5가지 시나리오이다. 모래/점토지반과 전이지역, 그리고 복합지반과 균일지반(곡률 시뮬레이션)에서의 TBM 운전 훈련과정이다.
Scenario 1. Boring in Sand
Scenario 2. Boring in Clay
Scenario 3. Boring Through Transitional Geology
Scenario 4. Boring in Mixed Face Conditions
Scenario 5. Boring in Homogeneous Conditions
시뮬레이터의 관리자 또는 사용자는 지오메트리(터널깊이), 지하수위, 그리고 지반의 매개 변수(soil parameters)를 조정할 수 있으며 수평 및 수직 곡률을 지정할 수 있다. 시뮬레이터의 핵심은 운전자의 입력(input)에 대해 적합한 출력(output)을 보여주기 위한 구성된 입/출력 관계와 알고리즘 그리고 시나리오이다. CSM에서는 시뮬레이터를 이용하여 터널링에 대한 단기과정(short course)에서 EPB TBM의 운전을 체험할 수 있는 EPB TBM Simulator 과정을 개설하고 있다(Fig. 3).
Chorley(2017)는 장비 설명서는 기계의 특정 시스템에 있는 각 제어장치와 연동장치의 기능을 설명할 수 있지만, 조작자에게 안전하고 최적의 생산을 달성하기 위해 기계를 조작하는 방법이나 그들이 직면하는 지반 조건의 변경과 관련된 상황을 극복하는 방법을 설명해 줄 수 없기 때문에, TBM이 조작자의 입력에 어떻게 반응하는지에 대한 경험은 실제 굴착작업을 수행하는 동안에만 얻을 수 있으며, 이것이 시뮬레이터가 필요한 근본적인 이유라고 하였다.
2.3 프랑스 Bouygues Travaux Public사 시뮬레이터
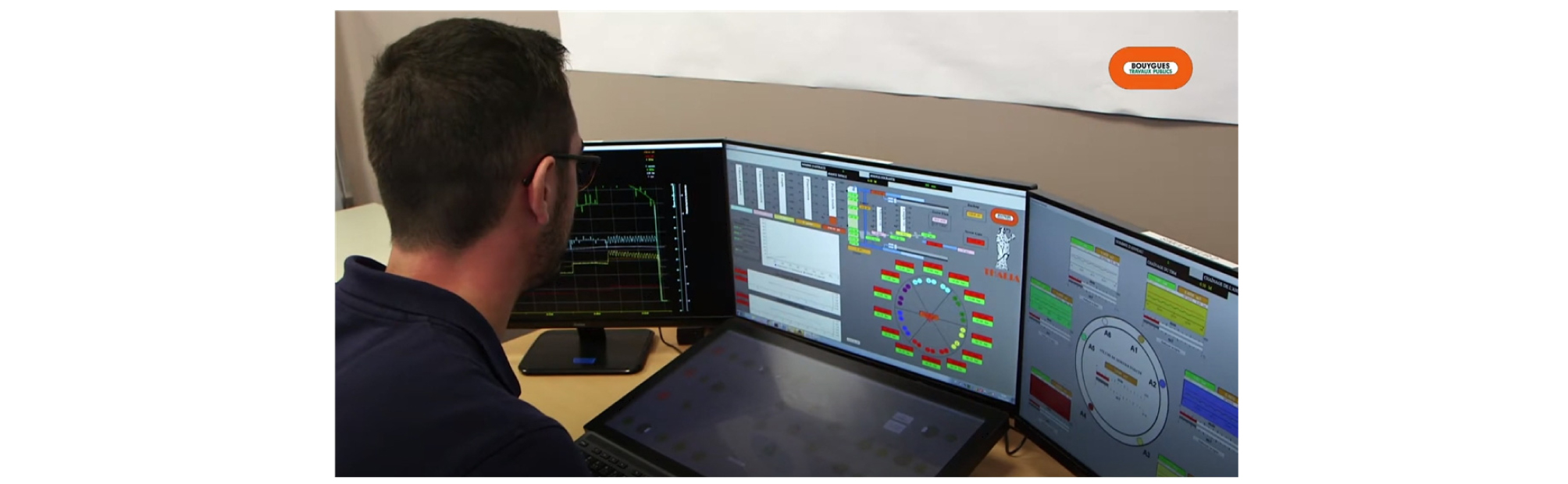
프랑스 Bouygues Travaux Public은 ‘THALIA’라는 명칭을 가진 Computer Based Training(CBT)타입의 시뮬레이터를 개발하였다(Ballantyne, 2017). 이 시뮬레이터는 Bouygues Travaux Public가 개발하고 프랑스의 사회교육원인 Gustave Eiffel Training Center에서 교육과정이 개설되는 구조로 되어있다.
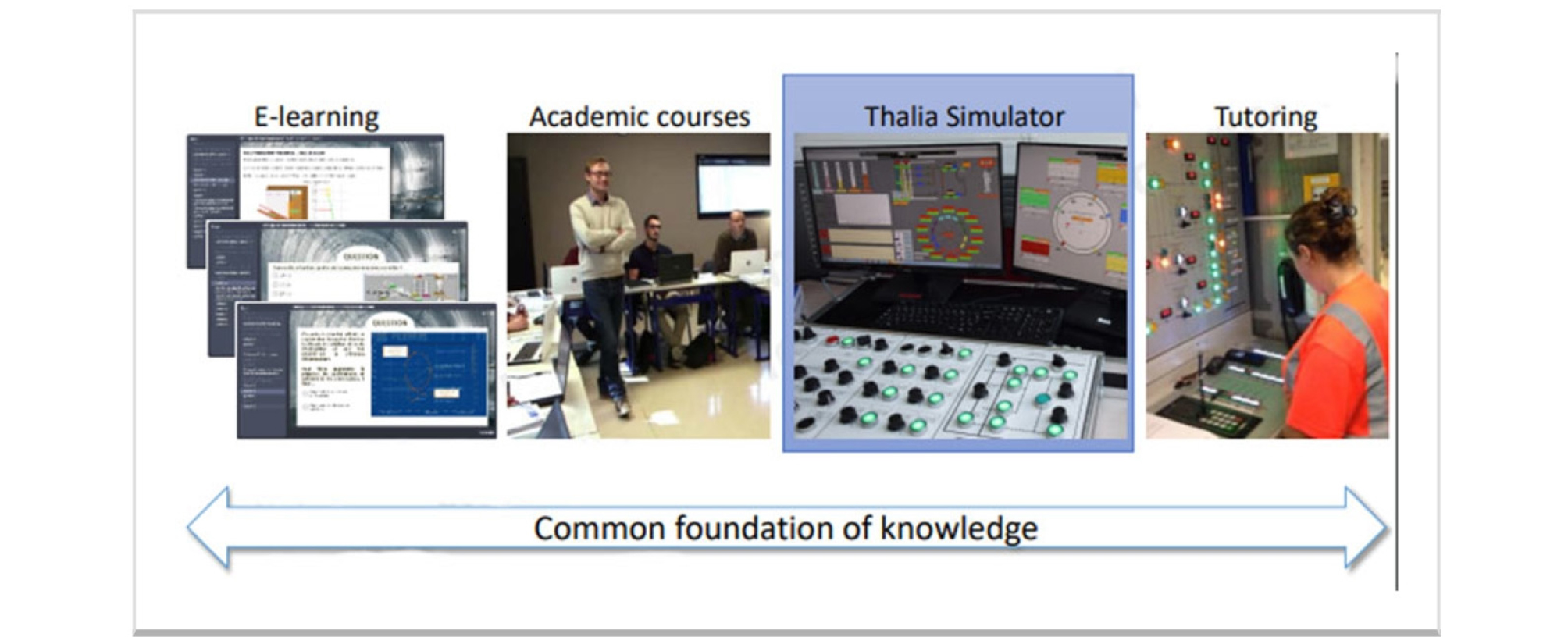
교육과정은 이론적인 교육과 전자매체를 이용한 학습(E-learning), 시뮬레이터(THALIA)를 이용한 실습, 전문가에 의한 교습으로 구성되어 있다(Fig. 4). 특히 THALIA는 15가지 시나리오에서 SLURRY TBM과 EPB TBM의 조작과 응답을 훈련하고 테스트하도록 설계되었다(Fig. 5). 이 시뮬레이터는 18개월 동안 개발된 것으로서 숙련된 TBM운전자에 의해 테스트되었고 Gustave Eiffel Training Center에서 6주간의 교육 프로그램을 통하여 10명의 자격을 갖춘 TBM 운전자를 배출한 바 있다(Bouygues Construction, 2017).
Bouygues Travaux Public의 부사장 Bertrand Burtschell은 기계가 산업화와 디지털화를 향해 더 광범위하게 사용되고 있으며, 결국 TBM이 지상에서 원격으로 작동하는 것을 보게 될 것이라고 언급하였다. 동시에 그는 프랑스에서 TBM을 사용하여 170 km의 새로운 터널을 만들어야 하는 Grand Paris 프로젝트만으로도 TBM의 수요가 증가할 것으로 예상하고 있다. 또한 현재 프랑스에는 약 30명의 TBM운전자만 있어 국제적으로 TBM 영역을 넓히기 위해서는 추가적인 TBM 운전자 교육이 필요하며, 미래에 파리에서 5~6대의 TBM을 운영하기 위해서도 새로운 TBM 운전자 양성이 요구된다고 하였다(Ballantyne, 2017).
2.4 스페인 Universidad Carlos III de Madrid 시뮬레이터
스페인의 Universidad Carlos III de Madrid에서는 마이크로 터널링 장비(microtunelling boring machines)를 대상으로 운전자의 훈련과 장비운영에 대한 데이터 수집 및 분석이 가능한 시뮬레이터를 개발하였다(Jardόn et al., 2012).
이 시뮬레이터는 마이크로 터널링(micro tunneling)중에 생성되는 숙련된 TBM 운전사의 노하우를 선택적으로 수집하고 작업상황에 따른 노하우 기반 작업방식을 그룹화하여 시스템화하였다(Fig. 6). 이러한 작업상황과 관련된 작업방식을 마이크로 터널링 장비의 운전을 위한 현실성 있는 함수 모델로 구성하였다. 개발된 시스템은 Fig. 7과 같이 실제 장비의 제어장치(pilot cabinet)와 유사한 Human-Machine Interface(HMI)로 구축하였고 그 인터페이스를 통해 운전자는 숙련 운전사의 노하우 기반으로 구현된 추론 엔진(inference engine)이 반영된 제어판(control panel)으로 편안하게 작업할 수 있게 하였다.
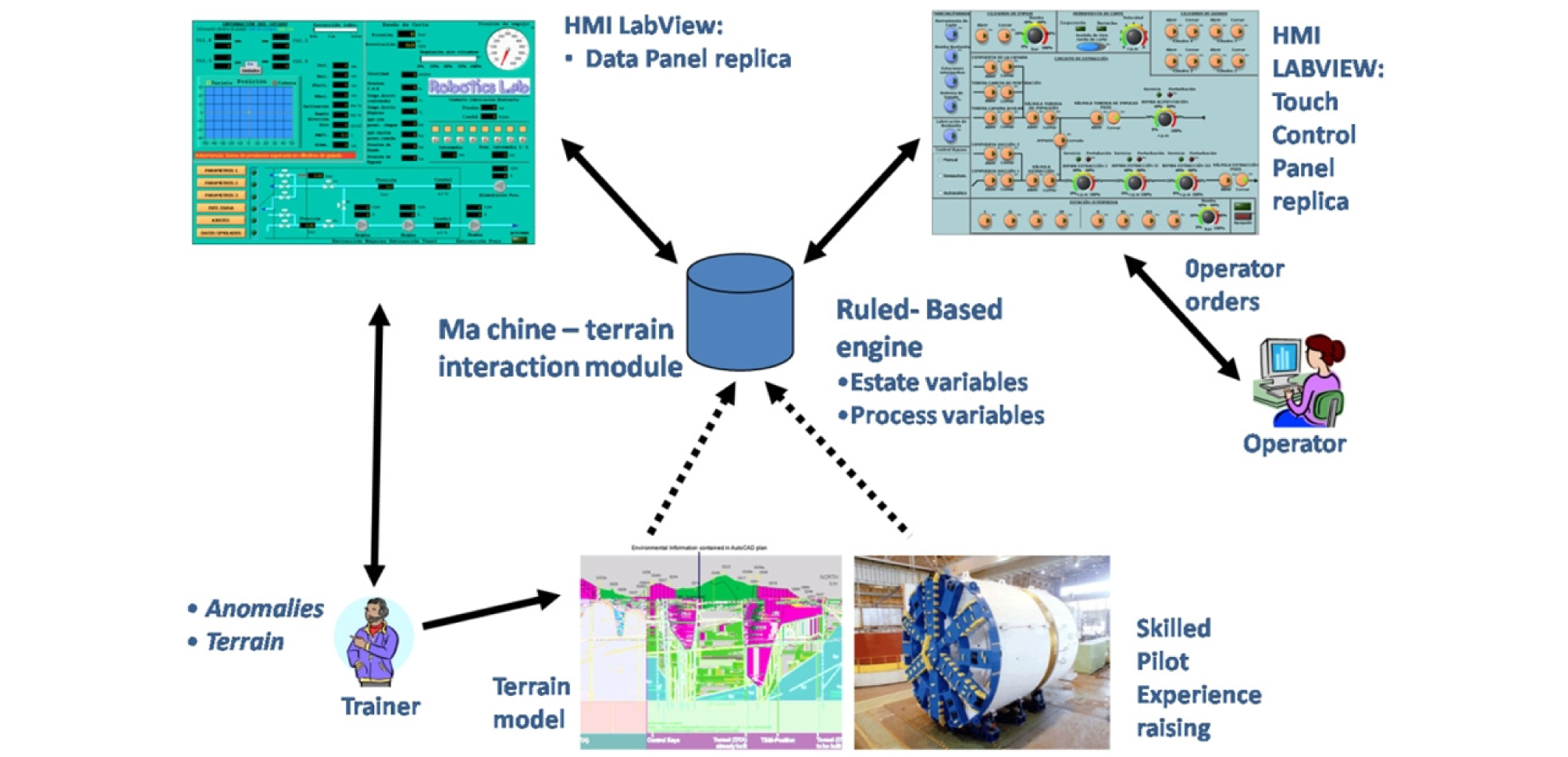

이 시스템에서 구성된 프레임워크(framework)는 시뮬레이션과 수집된 데이터 분석을 통해 마이크로 터널링 장비 운전자를 교육할 수 있으며, 원하는 경우 액추에이터(actuator)와 같은 기계부품의 작동(mechanical movement)에 걸리는 시간을 배제시키거나 줄일 수 있다. 제안된 HMI는 조작화면(command panel)과 계측화면(data panel)의 두 개의 화면으로 구성되며, HMI가 반영된 가상 파일럿 데스크(virtual pilot’s desk)는 교육시간과 비용을 절감할 뿐만 아니라 미래의 마이크로 터널링 장비 운전자와 그 장비에 대한 안전을 향상시킬 수 있다.
2.5 ITA-CET TBM 운전자 인증 제도
ITA WG14 및 ITAtech에서 활동하는 전문가들은 TBM 굴착 결과에 영향을 미치는 주요 요인 중 하나가 TBM 운전사(driver, pilot)의 노하우(know-how)라고 언급하였다. TBM 운전자 훈련을 위한 시뮬레이터의 사용은 최근 몇 년 동안 점점 더 많은 관심을 끌고 있으며 다양한 회사에서 현장의 지질과 작동 조건을 재현할 수 있는 장비를 개발하고 있다. 이 시뮬레이터는 훈련생인 운전자가 실제 굴착에서 접할 수 있는 다양한 상황에서 적합한 TBM 운전을 할 수 있도록 돕는 장점이 있다(ITA, 2019).
TBM 운전자는 운전방법뿐만 아니라 지질공학, 지반공학과 같은 지식과 기계 및 전기에 대한 지원기술을 가져야만 공사 중 위험에 대해 인지 및 대처를 할 수 있다. 또한 TBM 운전자는 건설 관계자와의 의사소통이 중요하며 수행하는 지하공간 건설 프로젝트의 요구 사항 및 위험에 대한 이해가 필요하다.
이를 위해 ITA-CET위원회는 ITA WG14 및 굴착(excavation)과 관련된 ITAtech Activity Group(SubAG TBM Service Guideline)의 계획에 따라 TBM 운전자인증제도(TBM driver certification scheme)를 개발하기로 결정했다. 이 계획은 강의실 교육(설계자, 계약자, 소유자 및 공급자의 관점을 포함), e-learning, 시뮬레이터 교육 및 현장경험을 포함한 포괄적인 접근 방식을 사용한다(Fig. 8). 이 제도의 목표는 TBM 운전자를 평가하는 독립적이고 표준화된 수단을 제공하여 궁극적으로 TBM 기반 작업의 전반적인 품질을 개선하는 ITA 인증을 제공하는 것이다(ITA, 2019).
이 인증 제도는 다양한 까다로운 상황에서 TBM을 운전하는 방법에 대한 지식을 심화하고자 하는 운전자뿐만 아니라 미래의 운전자도 대상으로 한다. 인증에 사용되는 시뮬레이터는 제도에서 정의된 기준을 준수하는 승인된 것으로만 한정되며 교육생은 숙련된 TBM 전문가에 의해 교육된다. 실제 TBM 운전석에서 이루어지는 최종 교육은 숙련된 TBM 전문가의 감독하에서 수행된다. 특정 TBM 유형에 대한 최종 ITA TBM “운전 면허증(등록 된 인증서 형태)”을 얻으려면 신청자는 e-Learning 및 강의가 포함된 이론 교육, 온라인 시험, 시뮬레이터 훈련과 평가, 구두 평가 및 업무 경험 증명을 성공적으로 마쳐야 한다.
이 제도에서는 전 세계의 관련 교육 기관이 인증 체계의 규칙을 준수하는 경우 교육과정을 제공할 수 있도록 할 예정이다. 이를 위해 품질 감사(quality audits)는 독립적인 외부 기관에서 수행한다. 교육적 측면은 ITA-CET위원회(AG2)에서 담당하며 행정적 측면은 ITACET Foundation에서 처리하게 된다.

3. 국내 TBM 운전 시뮬레이터 개발 현황
앞서 말한 바와 같이, TBM은 부속설비를 포함하면 하나의 공장이라 할 만큼 큰 장비이다. 특히 직경이 커질수록 이러한 경향을 잘 보여준다. TBM을 이용하여 지반을 잘 굴착하기 위해서는 유능한 전문인력 즉 경험이 많은 운전자가 필요하다. TBM의 시공품질이 운전자의 숙련도와 경험에 크게 좌우되는 것은 말할 나위가 없다. 중국을 비롯하여 전세계적으로 TBM공법의 사용이 증가하는 추세에 있지만, 숙련된 운전자는 상대적으로 부족한 실정이다. 본 연구에서는 국내에서 개발되고 있는 운전자 교육용 시뮬레이터에 대해 소개하고자 한다.
3.1 시뮬레이터의 시스템구성과 하드웨어
국내 TBM 산업은 후발 진입하는 실정을 감안하여 선진국과의 기술격차를 줄이고 차별화된 관련기술의 확보 차원에서 독자적인 기술개발 분야가 필요하다. 이를 위하여 TBM 운전과 관련한 전문인력 양성 방안을 마련하고자 하였다. 전 세계적으로 TBM 터널 건설이 활성화됨에 따라 TBM을 안전하고 효율적으로 운전할 수 있는 전문인력의 수요가 늘어가고 있어서 전문인력 양성의 중요성이 높아지는 실정이며 이를 위하여 TBM 시뮬레이터를 활용한 TBM 운전 인력 양성과 정규화된 훈련 체계는 전문인력 양성에 있어서 효과적인 방안이다(KICT, 2018).
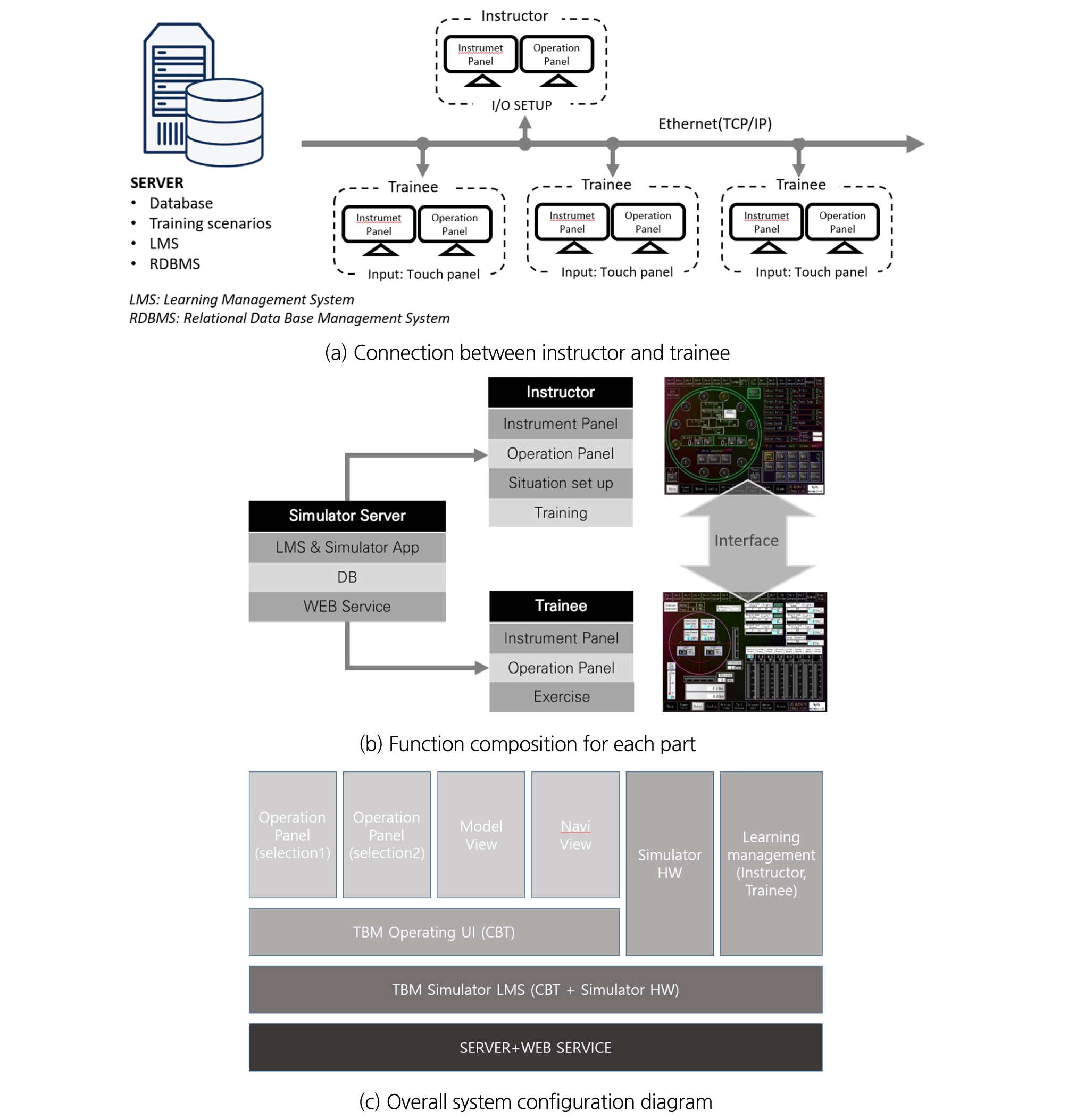
KICT(2019)에서는 CBT(Computer Based Training)타입과 별도의 하드웨어를 갖춘 FTS(Full Type Simulator)을 개발하고 있다. 이 시뮬레이터는 교수대와 학생용으로 구분되어 사용될 예정이며 Fig. 9(a), (b)와 같은 연결을 가진다. 모든 시뮬레이터에는 웹서비스 기반으로 교육을 관리하는 LMS(Learning Management System)가 탑재될 예정이다. 개발되고 있는 시뮬레이터 시스템의 구성은 Fig. 9(c)와 같다.
시스템 구성은 원격지 서버와 웹서비스를 통해 애플리케이션(application, 이후 APP)과 DB를 관리하는 3단계 구조를 가진다. 이러한 방식을 채택한 이유는 다양한 장비와의 연동, 교육장소 제약의 해제, DB 중앙화를 통해 관제 및 유지보수가 용이하기 때문이다. 즉, 시뮬레이터의 구동 정보와 교육자의 훈련 정보, 운전 시나리오 등을 서버에서 관리하여 장소의 제약 없이 본 연구에서 개발한 시뮬레이터를 구비한 곳에서는 동일한 자료와 훈련과정 공유가 가능하도록 구성한 것이다.
시뮬레이터 소프트웨어는 4가지 기본 프로그램으로 구성되며 크게 TBM 제어 패널(control panel)을 구현한 OP(Operation) APP, 각 APP들을 통제하기 위한 클라이언트 APP, TBM 장비 제어부분을 가시화하는 Modelview APP, TBM 굴진방향 및 자세를 확인하는 NaviView APP으로 구성되며 모든 APP은 서버와의 TCP/IP 통신을 통해 TBM 장비의 설정값을 클라이언트에서 획득한 후 동작하게 된다. 클라이언트 APP은 우리나라에서 일반화된 시스템 운영체계인 윈도우 기반 OS에서 동작하도록 제작되었으며 클라이언트 앱들은 서로 JSON 형태로 데이터를 주고받고 통신을 통해 서버와 동기화된다. OP APP 역시 데이터 교환 방식은 클라이언트와 동일하며, 각종 장비 지표 및 계기 정보들이 표시된다. ModelView APP은 장비 동작절차 정보 및 동작모델의 위치가 가시화된다. NaviView (TBMNavi) APP은 TBM 위치정보 및 굴진정보 등을 확인할 수 있다. 각 APP들은 TCP/IP 통신을 통해 데이터를 주고받는다.
위 시스템에 기반하여 제작된 시뮬레이터 하드웨어는 Fig. 10과 같다. TBM 장비에 탑재되어 있는 운전실을 모사한 실물 크기의 시뮬레이터 하드웨어 프로토타입을 제작하였다. CBT에서 터치 패널을 이용하여 TBM의 운전조작이 이루어졌다면 시뮬레이터 하드웨어에서는 버튼과 스위치를 이용하여 운전조작이 이루어진다는 점에서 차이가 있다. 실제 운전실의 제어 패널을 모사하였기 때문에 교육생은 좀 더 실제에 가까운 시뮬레이션을 할 수 있는 장점이 있다.
시뮬레이터 하드웨어는 기본적으로 CBT를 기반으로 한다. 단지 하드웨어, 즉 제어 패널의 버튼과 스위치가 워크스테이션에 연결되고 각 버튼과 스위치 조작으로 워크스테이션에 탑재된 CBT가 작동되는 것이다. 이때 하드웨어의 조작에 따라 TBM 시뮬레이터의 화면구성에 의해 제어 화면이 하드웨어에 보여진다. 이러한 점은 근본적으로 실제 TBM의 제어 패널 역시 같다.
시뮬레이터 하드웨어를 워크스테이션의 TBM 시뮬레이터에 연결시키는 방법으로 PLC(programmable logic controller)를 사용하였으며, 하드웨어의 각 버튼과 스위치에 대해LMS에서 정의된 각 키(key)를 연결시켜 PLC 입력모듈과 출력모듈을 정의하였다. 통신은 국제표준의 통신방식인 모드버스 형태로 하였다. Fig. 10(a)는 하드웨어와 LMS 기반의 TBM 시뮬레이터 프로그램 간의 연동을 확인하는 모습이고 Fig. 10(b)는 하드웨어 프로토타입을 전시한 모습, 그리고 Fig. 10(c)는 CBT의 UI이다.

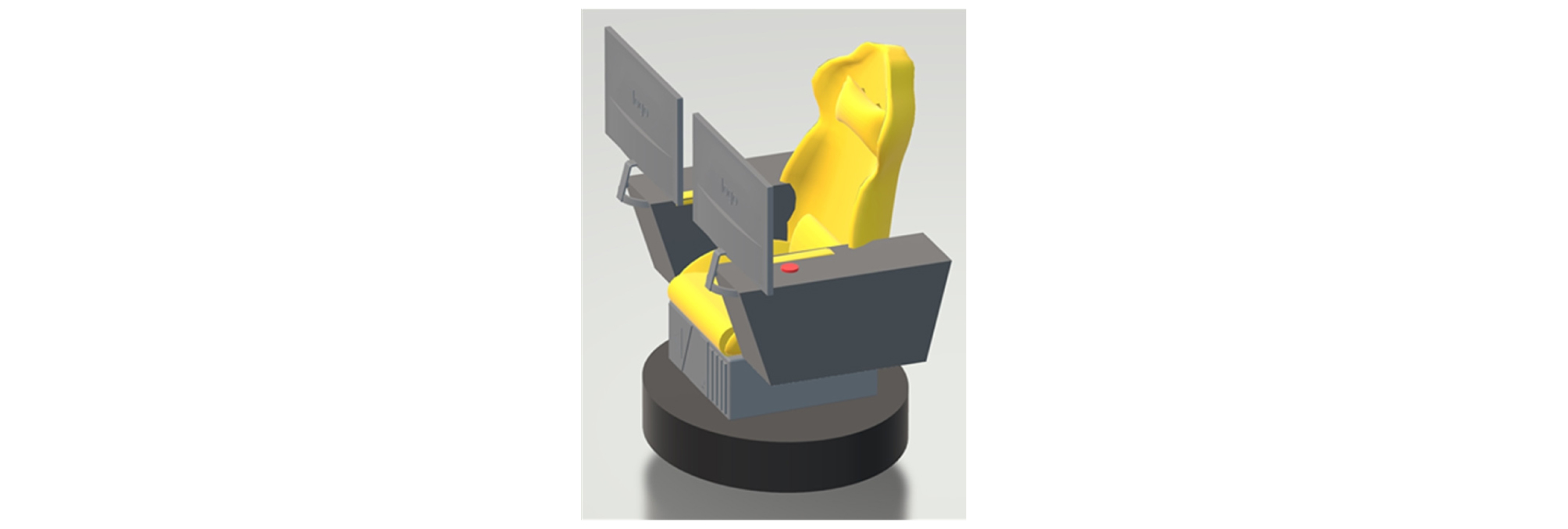
Fig. 11은 KICT에서 두 번째 프로토타입으로 개발하고 있는 체어타입의 시뮬레이터 하드웨어이다.
3.2 LMS와 시나리오 개발
TBM 시뮬레이터 LMS(Learning Management System)는 CBT(Computer Based Training)와 시뮬레이터 장비 기반으로 운영된다. 웹서비스기반으로 시뮬레이터 하드웨어의 모든 키 정보가 CBT와 PLC를 통해서 연동되며, 키의 순서는 LMS에서 정의한 키 라우팅 정보에 의해서 운전·제어 시나리오가 구성된다.
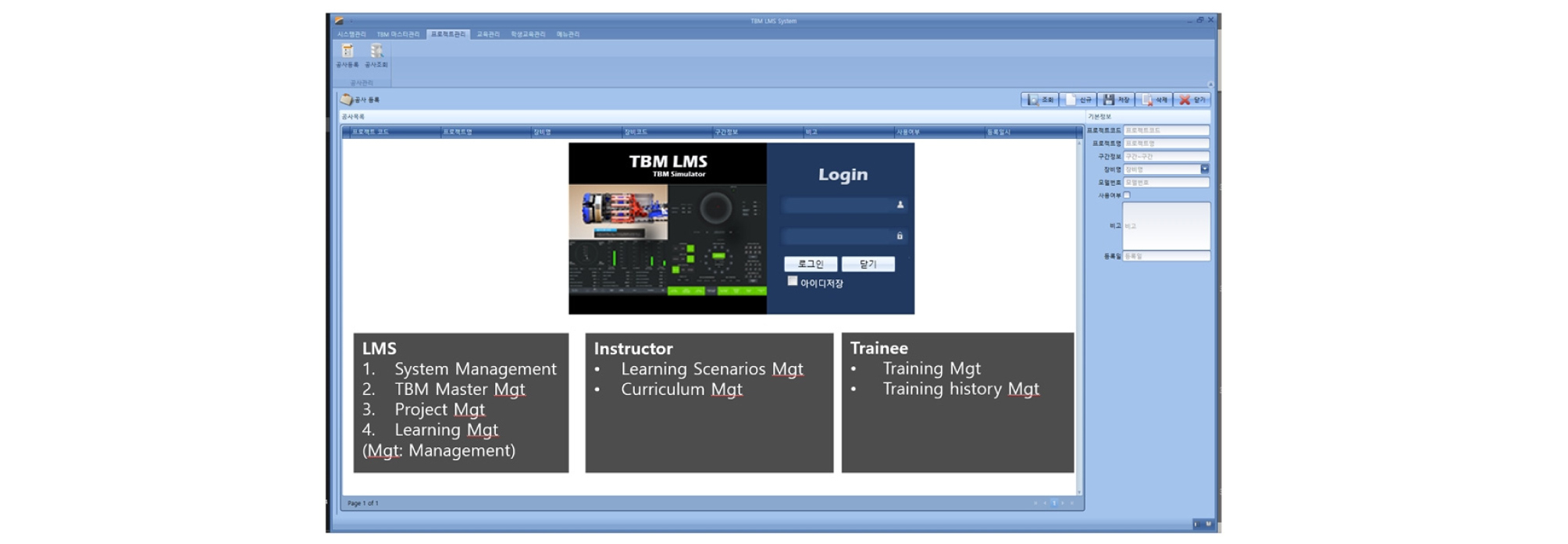
교수들은 LMS로 교육훈련을 자유롭게 만들 수 있으며 교육과정을 관리할 수 있다. 학생들은 교육과정을 신청하고 교육 수행에 대한 이력을 확인 할 수 있다. LMS의 메뉴는 크게 1. 시스템관리, 2. TBM마스터관리, 3. 프로젝트관리, 4. 교육관리로 구성되어 있고 교수는 LMS의 1, 2, 3, 4번 메뉴를 활용하며, 학생은 4번 메뉴(학생교육관리)를 이용하여 시스템을 이용하게 된다(Fig. 12).
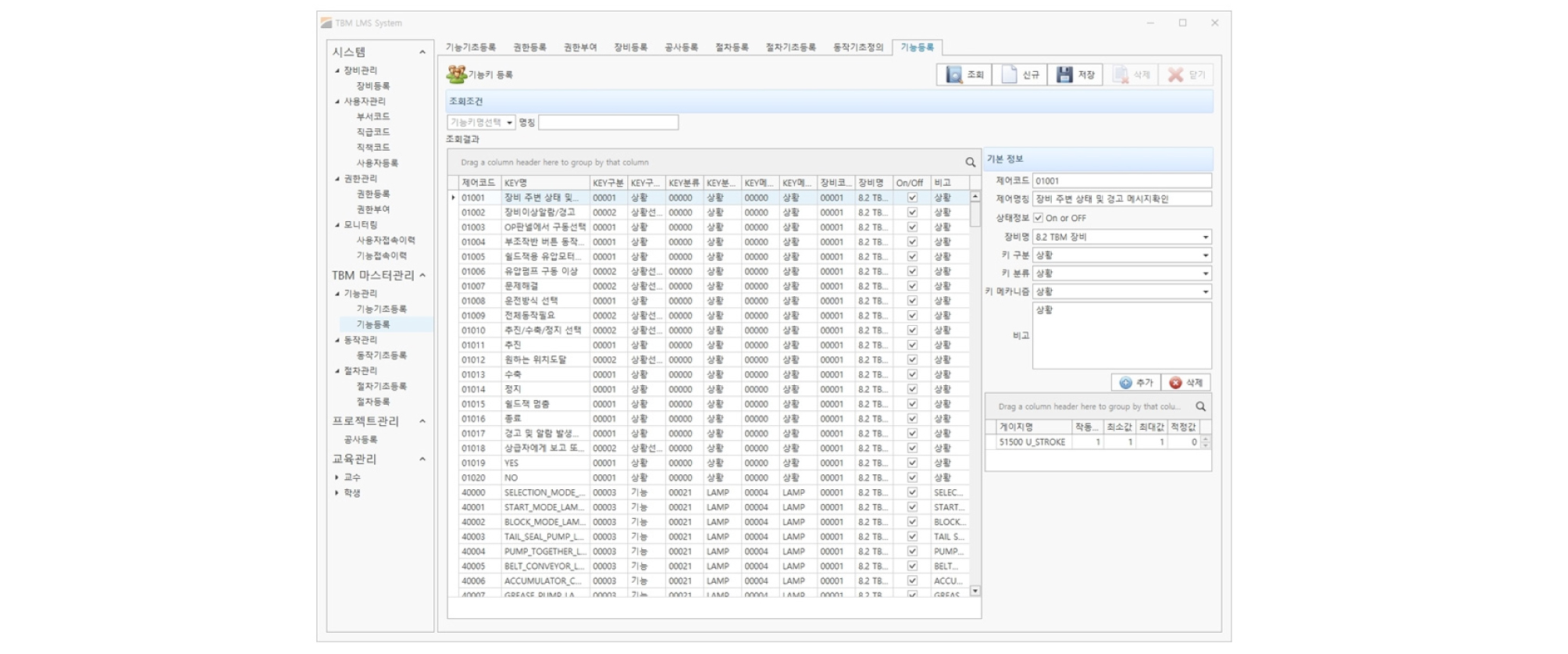
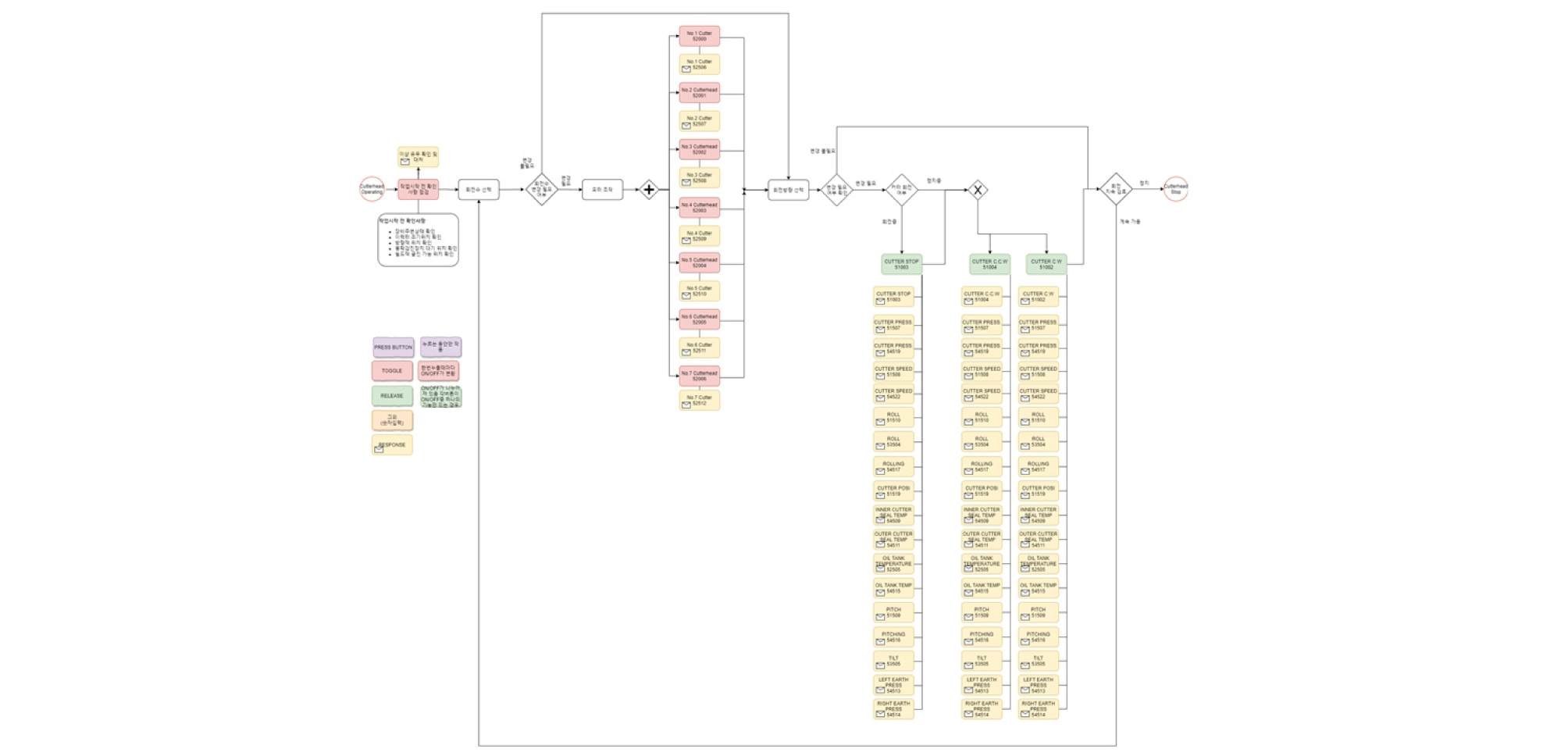
KICT에서 개발하고 있는 시뮬레이터는 TBM의 기본적인 운전, 구동, 제어 등의 작업과정뿐만 아니라 지반조건에 따른 TBM의 압착, 끼임, 막힘 등에 대한 시공트러블 조건들을 포함하여 총 30개 이상의 시나리오를 포함한다. 각 시나리오는 Fig. 13과 같이 LMS에 구성된 기능관리/동작관리/절차관리 메뉴를 통해 등록된다. 각 시나리오의 구성을 효과적으로 하기 위해 프로세스를 BPMN(Business Process Model and Notation)으로 작성하여 관리하고 있다(Fig. 14).
4. 결 론
TBM의 운전 전문인력은 세계적으로 부족한 상황이며 신규 인력의 시공경험 부족은 각종 시공리스크 발생 시 대응능력 저하를 가져올 수 있다. 본 연구에서는 아직 진행단계인 국내외 TBM 시뮬레이터 기술에 대해 살펴보았다.
현재의 TBM 전문인력뿐만 아니라 신규 운전인력에게 이론교육과 시뮬레이터 또는 현장 실습교육을 제공하는 것은 관련 산업 표준을 개선하고 지반침하 등의 시공 트러블을 줄이는데 필요한 사항임을 국외 선진국 및 국제터널협회에서도 인식하고 실습교육 측면에서 실제 문제를 발생시키지 않는 가상의 상황에서 반복적으로 교육이 가능한 시뮬레이터에 대한 관심 및 개발이 증가하고 있다.
국내에서도 TBM 운전자의 숙련도와 경험에 따라 TBM 시공품질 크게 좌우되는 점과 숙련인력 부족에 의한 생산성 저하, 숙련도 저하에 의한 안전성 저하, 그리고 도제식으로 양성되는 TBM 운전자에 대한 문제점을 인식하고 컴퓨터와 실제 TBM 제어패널 등을 이용하여 웹서비스 기반의 TBM 시뮬레이터 교육시스템을 개발하고 있다.
특히 국내의 경우 TBM의 활용에 대한 보편적인 생각은 많이 개선되었지만, NATM 시공과의 비교에서 비용문제로 아직까지 활용에 대해 보수적인 점을 감안할 때 TBM 공사에서의 사고 및 공사지연 등을 최소화할 필요가 있다. TBM 운전 측면에서 이러한 문제를 최소화시킬 수 있는 방법에 대한 해결책은 운전자의 훈련이라고 할 수 있다.
국내외 진행상황으로 볼 때, TBM 운전자 교육 및 인증 또는 라이센스를 통한 공식적인 교육 인정은 멀지 않은 미래에 표준이 될 것으로 예상된다.
