

1. 서 론
2. 자율주행 로봇의 개발 방법
2.1 자율주행 로봇 시스템 구성
2.2 라이다 센서의 원리와 기능
2.3 라이다 센서를 활용한 조향 제어
3. 현장 실험 방법
3.1 실험 지역
3.2 주행 실험 방법
4. 실험 결과
5. 결 론
1. 서 론
자율주행 기술이란 운전자의 조작 없이 주변 환경을 인식하며 목적지까지 자동으로 주행하는 기술로서, 자동화 정도에 따라 6단계로 분류될 수 있다(SAE, 2019). 자동차 산업 분야의 많은 기업이 높은 수준의 자율주행 기술을 구현하기 위해 경쟁하고 있다(Audi, 2019, GENERAL MOTORS, 2019, TESLA, 2019). 최근에는 정보통신기술(Information and Communication Technology, ICT)의 발달과 함께 글로벌 IT 기업들도 자율주행 기술에 관한 연구를 진행하고 있다. 대표적으로 구글은 자율주행 차량용 운영체제를 개발한 후 2021년까지 완전자율주행을 목표로 하고 있다. 엔비디아는 볼보, 테슬라와 같은 자동차 기업들과 협력하여 자율주행 기술에 관한 연구를 수행하고 있다(Kim and Kim, 2017, NVIDIA, 2019).
광업 분야에서도 트럭이나 로더와 같은 채광 장비들의 자동화를 위한 자율주행 기술이 연구되고 있다. Larsson et al.(2005)은 라이다 센서와 퍼지로직 기법을 활용하여 자율주행이 가능한 로더 장비를 개발하였다. Marshall et al.(2008)은 자율주행 기술을 Load-Haul-Dump(LHD) 장비에 적용하여 광물 운반 작업을 수행하였고, 실제 지하광산 현장에서 성능 확인 실험을 수행하였다. Volvo(2019)는 석회석 광산을 대상으로 하여 자율주행 트럭의 운송 테스트 작업을 수행하였고, 2020년까지 완전한 자동화를 목표로 하고 있다.
지하광산에서 사람이 접근하기 위험한 지역을 조사하기 위한 자율주행 로봇에 관한 연구도 다수 수행되었다. Baker et al.(2004)은 지하광산 탐사용 자율주행 로봇 'Groundhog'를 개발하였고, 폐광된 지하광산을 대상으로 한 성능 테스트를 수행하였다. Günther et al.(2019)은 지하광산의 라이다 센서와 3차원 카메라를 활용하여 온도, 유독 가스의 농도와 같은 환경적인 요소들을 측정할 수 있는 자율주행 로봇을 개발하였다. 그 외에도 라이다 센서와 자율주행 로봇을 활용하여 지하광산의 갱도를 맵핑하기 위한 연구들이 수행되었다(Bakambu and Polotski, 2007, Neumann et al., 2014, Ghosh et al., 2016).
국내의 경우 해외와는 달리 광업 분야에서 활용할 수 있는 자율주행 로봇 개발과 관련한 연구가 매우 미흡한 실정이다. 그러나 최근 국내에서도 지하광산용 소형 자율주행 로봇의 개발과 활용을 위한 기초 연구가 시작되고 있다. Kim and Choi(2019)는 라이다 센서를 활용한 지하광산 탐사용 소형 자율주행 로봇을 개발하였고, 광산 현장을 모사한 실내시험장을 대상으로 주행테스트를 수행하였다. 그러나 실제 지하광산 현장에서의 주행테스트는 이루어지지 않았다. 실제 지하광산은 실내 실험장과는 달리 도로의 형태가 불규칙하게 변하며, 벽면의 거칠기가 크고 노면의 굴곡이 크기 때문에 안정적인 주행을 저해하는 물리적인 제약들이 있을 수 있으므로, 현장실험을 통해 주행성능을 확인해 볼 필요가 있다.
본 연구의 목적은 거리를 측정할 수 있는 라이다 센서를 이용하여 지하광산용 자율주행 로봇을 개발하고, 지하광산 현장에서 주행성능 실험을 수행하는 것이다. 라이다 센서를 활용하여 좌, 우측 벽면까지의 거리를 측정하며, 이를 통해서 로봇의 위치를 파악하고 로봇이 도로의 중앙지점을 따라 이동될 수 있도록 조향을 제어할 것이다. 또한, 무선으로 통신이 가능한 블루투스 비콘을 활용하여 목적지에서 로봇이 자동으로 정지될 수 있도록 할 것이다. 본 논문에서는 자율주행 로봇의 개발 방법과 라이다 센서 기반 조향 제어 방법에 관해 설명하고, 국내 자수정 폐광산을 대상으로 한 주행 실험 결과를 제시한다.
2. 자율주행 로봇의 개발 방법
2.1 자율주행 로봇 시스템 구성
Fig. 1은 본 연구에서 개발한 자율주행 로봇의 전체적인 구성과 통신환경을 보여준다(Kim and Choi, 2019). 자율주행 로봇은 하위/상위/원격 컨트롤러(Low Level/High Level/Remote Controller), 주행 플랫폼(Driving platform) 및 센서들로 구성되며 각각의 기능은 다음과 같다.
∙ 하위 컨트롤러(Low Level Controller): 로봇의 내부에 탑재되며, 주행 플랫폼의 모터 제어
∙ 상위 컨트롤러(High Level Controller): 로봇의 상부에 탑재되며, 로봇의 상태 모니터링 및 하위 컨트롤러 제어
∙ 원격 컨트롤러(Remote Controller): 로봇과 떨어진 곳에서 상위 컨트롤러와 연결되어 원격으로 로봇 제어
∙ 블루투스 비콘 & 비콘 수신기(Bluetooth beacon & Beacon receiver): 블루투스 비콘으로부터 수신되는 신호를 이용하여 로봇의 정지 제어
주행 플랫폼으로 언맨드솔루션사의 이동형 로봇 ERP-42(Unmanned Solution, 2019)를 사용했다. ERP-42는 4개의 바퀴를 가진 이동로봇으로, 실제 자동차와 유사한 원리로 구동된다. Table 1은 본 연구에서 사용한 하위, 상위, 원격 컨트롤러의 사양과 개발에 사용한 프로그래밍 언어를 보여준다. 상위 컨트롤러와 원격 컨트롤러는 Windows 운영체제 기반의 노트북 PC를 사용하였고 하위 컨트롤러는 AVR 마이크로 컨트롤러인 ATMega128(MICROCHIP, 2019)을 사용하였다. 로봇의 정지 제어를 위해서 사용된 블루투스 비콘의 경우 Perples에서 개발한 RECO 비콘(RECO, 2019)을 사용하였고, 비콘의 신호를 수신하기 위해서 오픈 소스형 하드웨어인 HM-10(COMPONENTS101, 2019) 모듈을 사용하였다.
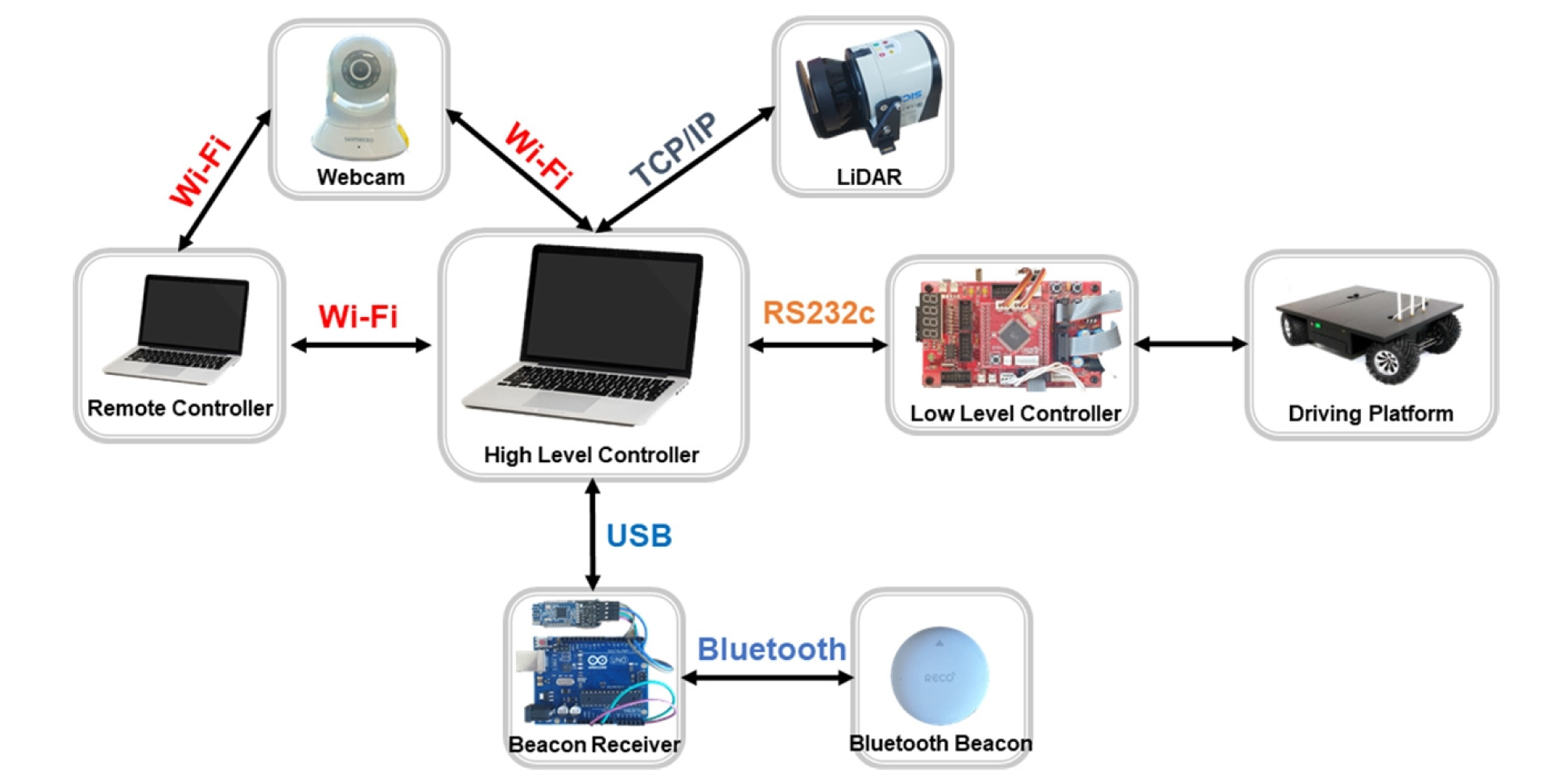
Fig. 1.
Overall structure of autonomous driving robot developed in this study (modified from Kim and Choi, 2019)
Table 1. Specifications and programming language of High Level/Low Level/ Remote Controller and Driving platform used in this study
| Specification | Programming Language | |
| High Level Controller |
Intel Celeron(R) CPU 1007U 1.50 GHz, 4 GB RAM, Intel(R) HD Graphics, Windows10 |
NI LabVIEW (NATIONAL INSTRUMENTS, 2019) |
| Low Level Controller | AVR Microcontroller ATMega128 Pro Kit (MICROCHIP, 2019) | C Language |
| Remote Controller |
Intel Atom(TM) CPU N2600 1.60 GHz, 2 GB RAM, Intel(R) Graphics Media Accelerator 3600 Series, Windows 7 | NI LabVIEW |
| Driving Platform |
650 mm (length) × 470 mm (width) × 158 mm (height) 8 kg | - |
2.2 라이다 센서의 원리와 기능
라이다 센서는 레이저 빛을 이용하여 대상까지의 방향과 거리를 측정하는 장치이다(Kim et al., 2012). 본 연구에서 사용한 라이다 센서는 SICK사의 LMS-111이며(SICK, 2019), Fig. 2(a)는 LMS-111 라이다 센서의 탐지 범위를 나타낸다. LMS-111은 센서에서 발사한 레이저 빛이 물체에 도달한 후 반사되어 돌아오는 데까지 걸리는 시간을 통해 물체까지의 거리를 측정한다. Table 2는 본 연구에서 사용한 LMS-111 라이다 센서의 자세한 사양을 보여준다.
본 연구에서는 라이다 센서로부터 노트북 PC로 전송된 거리 데이터를 처리하기 위해 LabVIEW 소프트웨어를 사용하였다(NATIONAL INSTRUMENTS, 2019). Fig. 2(b)는 라이다 센서로부터 전송받은 데이터를 실시간으로 모니터링할 수 있는 인터페이스 화면을 나타낸다. 인터페이스 화면에는 라이다 센서의 TCP/IP 통신을 위해 사용되는 IP 주소, 통신 속도, 각 분해능 등을 설정할 수 있으며, 좌, 우측면까지의 거리와 그 차이를 모니터링할 수 있다. 또, 라이다 센서의 수평 270° 지역의 형태를 실시간으로 가시화한다.
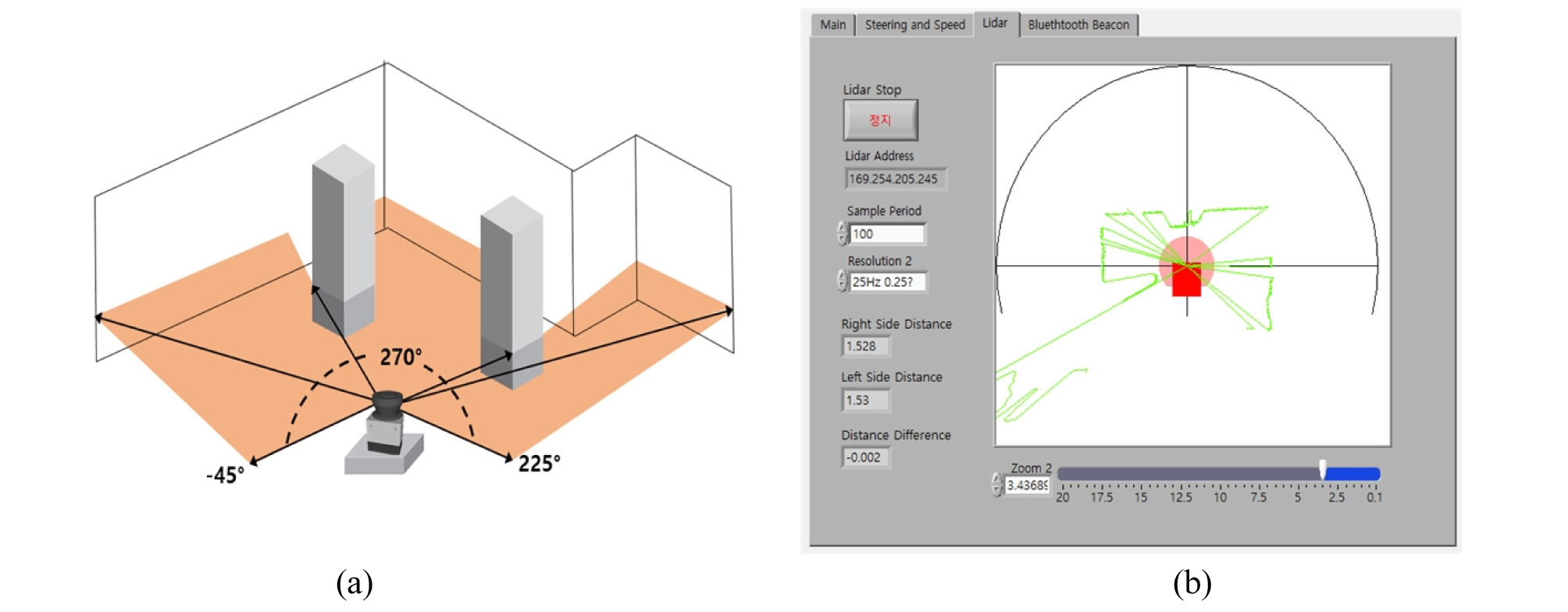
Table 2. Specifications of LMS-111 LiDAR sensor (SICK, 2019)
| Field of View | 270° |
| Scanning frequency | 25/50 Hz |
| Angular resolution | 0.25° |
| Operating Range | Maximum 20m |
| Response time | ≥ 20 ms |
| Interface | TCP/IP |
| Operating voltage | 10.8 ∼ 30 V DC |
2.3 라이다 센서를 활용한 조향 제어
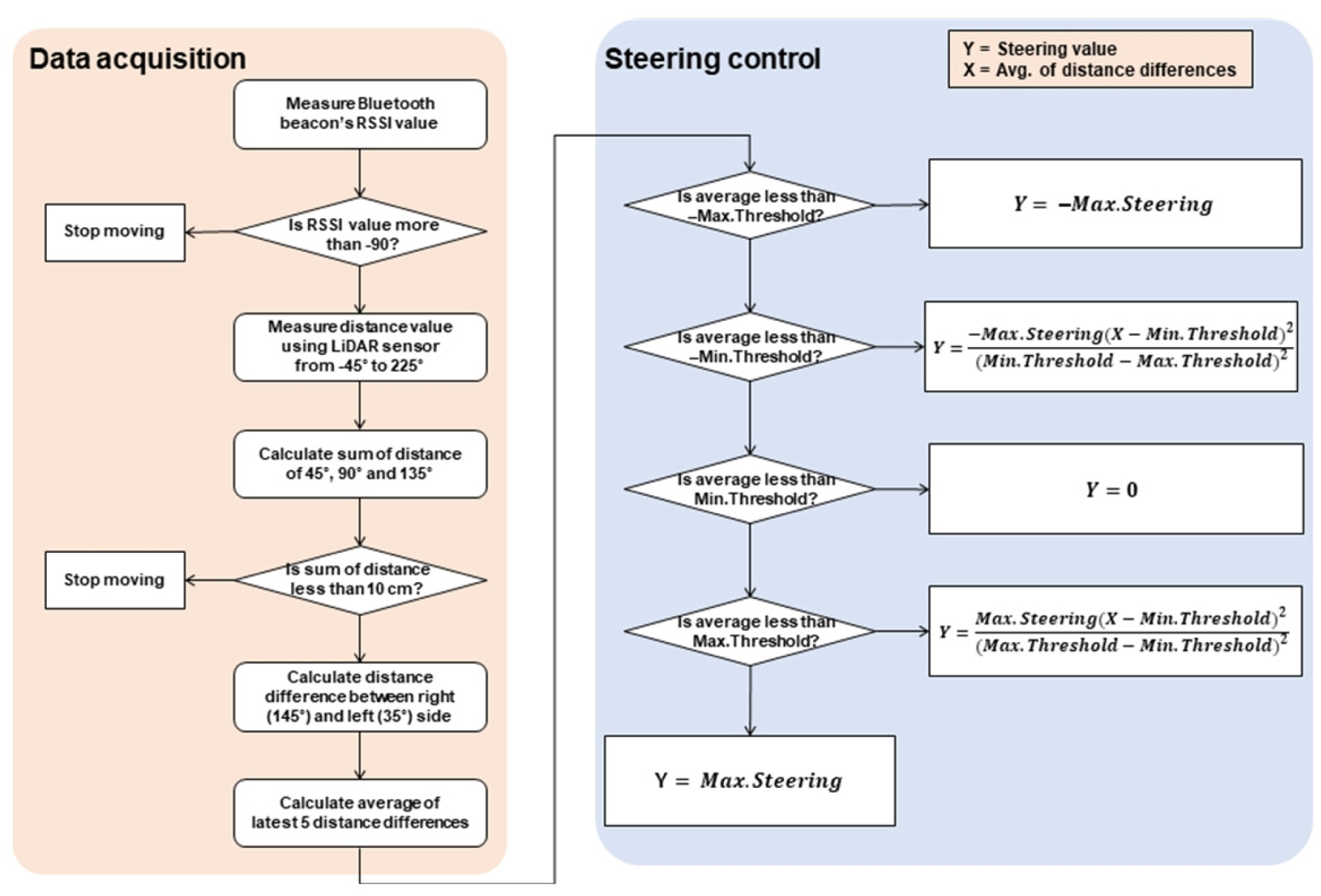
Fig. 3은 라이다 센서로부터 획득된 거리 데이터를 통해서 자율주행 로봇의 정지 기능 및 조향을 제어하는 순서도이다. 순서도는 라이다 센서를 통해 데이터를 획득하는 부분과 획득된 데이터를 기반으로 하여 조향을 제어하는 부분으로 구성된다.
자율주행 로봇은 블루투스 비콘에서 송신되는 신호의 RSSI(Received Signal Strength Indicator) 값이 –90 이하일 경우 정지한다. 라이다 센서로부터 –45° 지점부터 225° 지점까지, 총 270° 범위의 거리 데이터를 획득한다. 획득한 거리 데이터 중에서 전방 45°, 90°, 135° 지점까지의 거리 합이 10 cm보다 작을 경우, 자율주행 로봇의 정면에 장애물이 근접한 것으로 판단하여 정지한다. 전방의 도로 형태를 미리 인지하고 조향을 제어하기 위해서 좌, 우전방 35° 지점까지의 거리를 측정한다. 로봇의 조향이 급격하게 변하는 것을 막기 위해 최근에 입력된 거리 데이터 5개의 평균을 계산하며, 평균값에 따라 조향이 제어된다.
로봇의 우측 벽면까지의 거리에서 좌측 벽면까지의 거리 차이 값을 통해서 로봇의 상대적인 위치를 인식하며, 로봇의 위치에 따라서 조향이 제어될 수 있도록 하였다. Max.Threshold는 조향 값이 최대가 되는 거리 차이 값이고 Min.Threshold는 조향이 변할 수 있는 최소 거리 차이 값이며, (+)는 우측, (-)는 좌측을 의미한다.
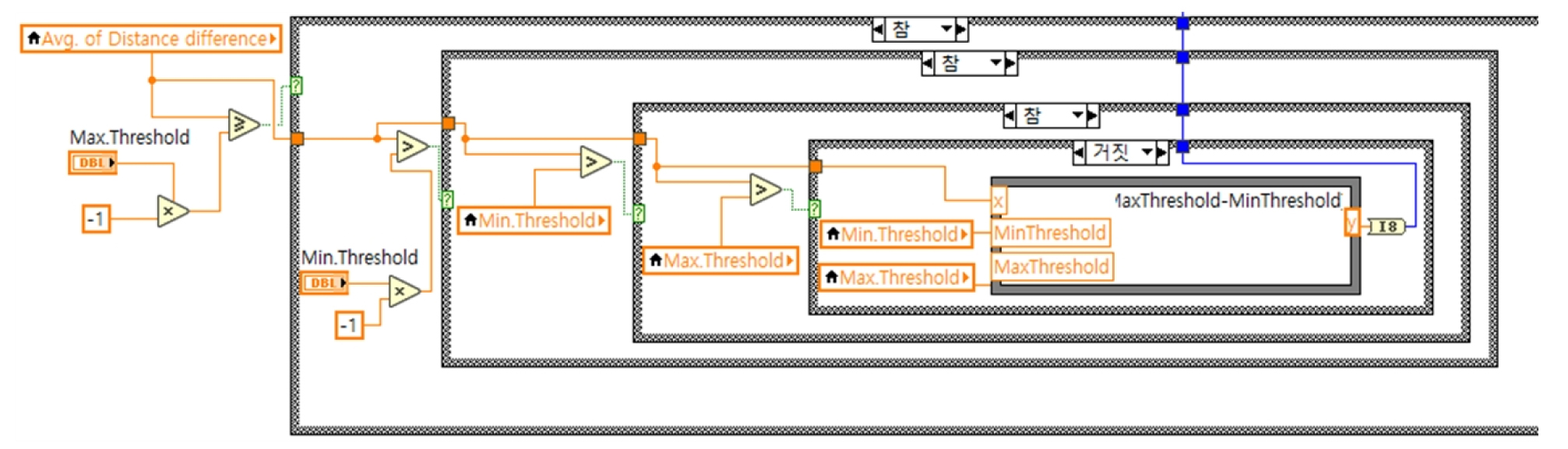
거리 차이 값이 – Max.Threshold 작을 경우 우측 벽면까지의 거리보다 좌측 벽면까지의 거리가 매우 크다고 판단하며, 조향 값은 좌측으로 최대 회전하는 – Max.Steering 값을 가진다. 거리 차이 값이 – Max.Threshold 보다 크고, – Min.Threshold 보다 작으면 상대적으로 우측 벽면에 밀착된 상태로 판단하며, 조향 값은 우측으로 밀착된 정도에 따라 좌측으로 회전될 수 있는 값을 가진다. 거리 차이 값이 – Min.Threshold 보다 크고, Min.Threshold 보다는 작은 경우에는 로봇이 도로의 중앙지점에 있다고 판단하며, 조향 값은 0을 가진다. 거리 차이 값이 Min.Threshold 보다 크고, Max.Threshold 보다 작으면 상대적으로 좌측 벽면에 밀착된 상태로 판단하며, 조향 값은 좌측으로 밀착된 정도에 따라 우측으로 회전될 수 있는 값을 가진다. 거리 차이 값이 Max.Threshold 보다 클 경우 좌측 벽면까지의 거리보다 우측 벽면까지의 거리가 매우 크다고 판단하며, 조향 값은 우측으로 최대 회전하는 Max.Steering 값을 가진다. Fig. 4은 자율주행 로봇의 조향 제어를 위한 프로그래밍 코드의 블록 다이어그램을 보여준다.
3. 현장 실험 방법
본 연구에서는 라이다 센서 기반의 자율주행 로봇을 활용하여 지하광산 갱도 현장실험을 수행하였다. 실험에 앞서 로봇의 조향 제어에 영향을 주는 임계값들을 설정하기 위해 사전 주행테스트를 수행하였다. 총 5회의 반복 실험을 수행하였고, 이를 영상으로 촬영하여 주행 정확도를 분석하였다.
3.1 실험 지역
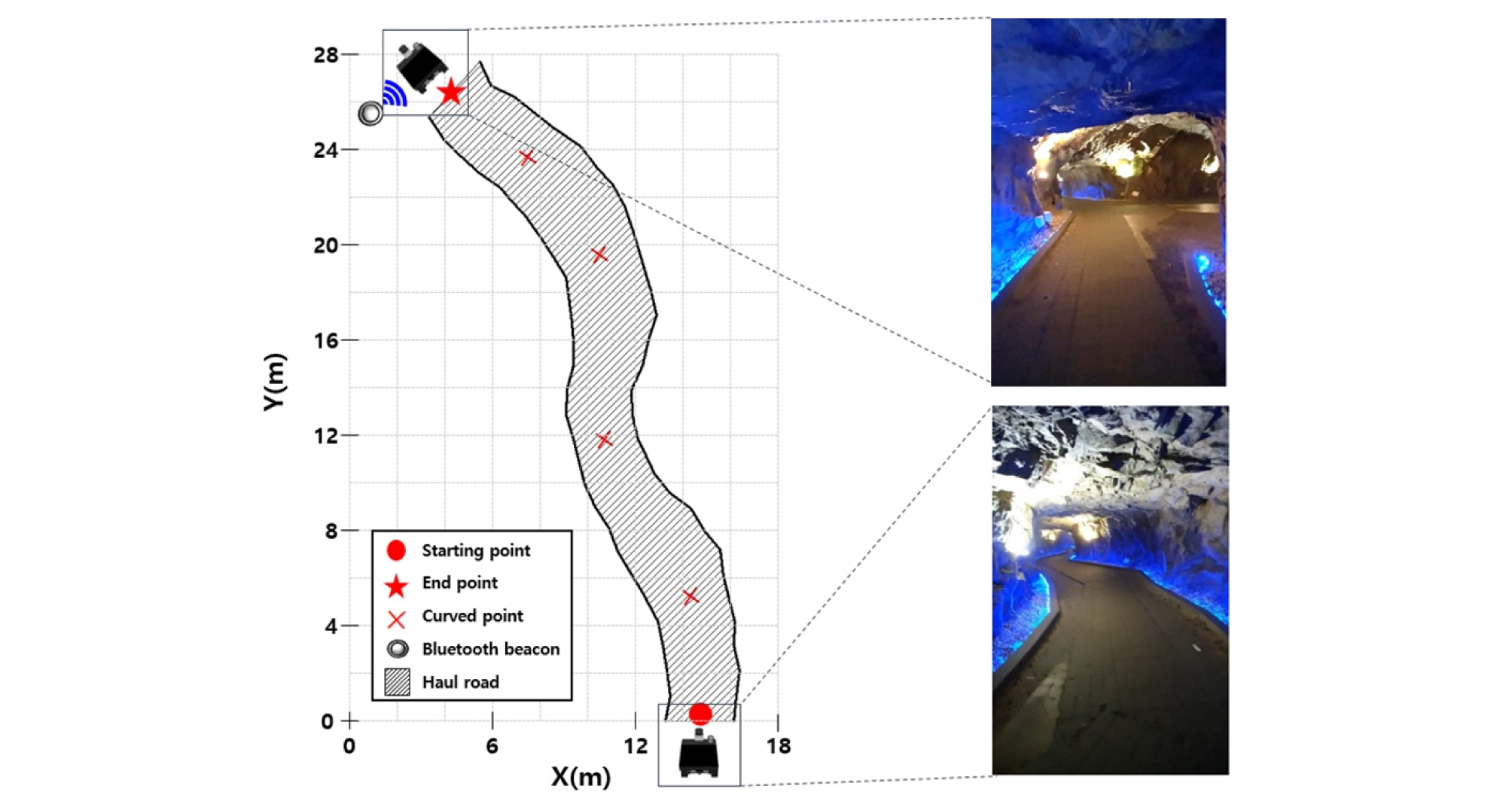
대한민국 울산광역시 울주군에 있는 자수정광산(35°32'43''N, 129°5'37''E)을 대상으로 하였다. 자수정광산은 총 길이 2.5 km, 평균 내부 온도 12∼16°C, 면적 16,000 m2이며, 현재는 폐광된 상태이다. 갱도 폭 3 m, 총 길이 30 m, 인 일부 지역을 Fig. 5와 같이 실험 구간으로 설정하였다. 실험 구간은 4지점의 곡선 지점을 포함하고 있으며, 각각의 곡선 지점은 출발지점을 기준으로 하여 각각 -30°, 0°, 45°, 48°의 곡률을 가진다. 실험 구간은 자율주행 로봇에 탑재된 라이다 센서의 높이(60 cm)보다 높은 벽면을 형성하고 있었기 때문에 모든 주행 구간에서 라이다 센서를 통한 좌, 우 벽면까지의 거리측정이 가능하였다. 지하광산 갱도의 중앙지점을 따라 50 cm의 폭으로 설치된 보도블록을 주행 가능 영역으로 설정하였다. 도착지점에 블루투스 비콘을 설치하여 자율주행 로봇이 자동으로 정지되도록 구성하였다.
3.2 주행 실험 방법
자율주행 로봇은 출발지점에서 원격 컨트롤러부터 신호를 전송받은 후 4 km/h의 속도로 주행을 시작한다. 자율주행 로봇이 라이다 센서를 통해 거리를 측정하며, 거리 차이에 따라 조향을 제어하여 도착지점까지 자동으로 이동한다. 로봇이 주행하는 동안 로봇에 부착된 웹캠의 영상과 라이다 센서를 통해 측정되는 갱도의 수평 거리 데이터를 기록하였다. 또한, 로봇이 주행 과정을 외부에서 영상으로 촬영한 후 주행 경로를 분석하였다.
4. 실험 결과
Fig. 6은 본 연구에서 개발한 자율주행 로봇을 활용하여 지하광산 환경에서 주행하는 모습을 보여준다. 자율주행 로봇은 출발지점에서 원격 컨트롤러로부터 신호를 수신하여 출발한 후 4곳의 곡선 지점에서 안정적으로 코너링을 하였다. 자율주행 로봇은 5회의 반복 실험 동안 전체 실험 구간에서 갱도의 중앙지점을 따라 설치된 보도블록을 이탈하지 않고 안전하게 주행하였으며, 총 주행 시간은 평균적으로 74.6 초가 소요되었다.
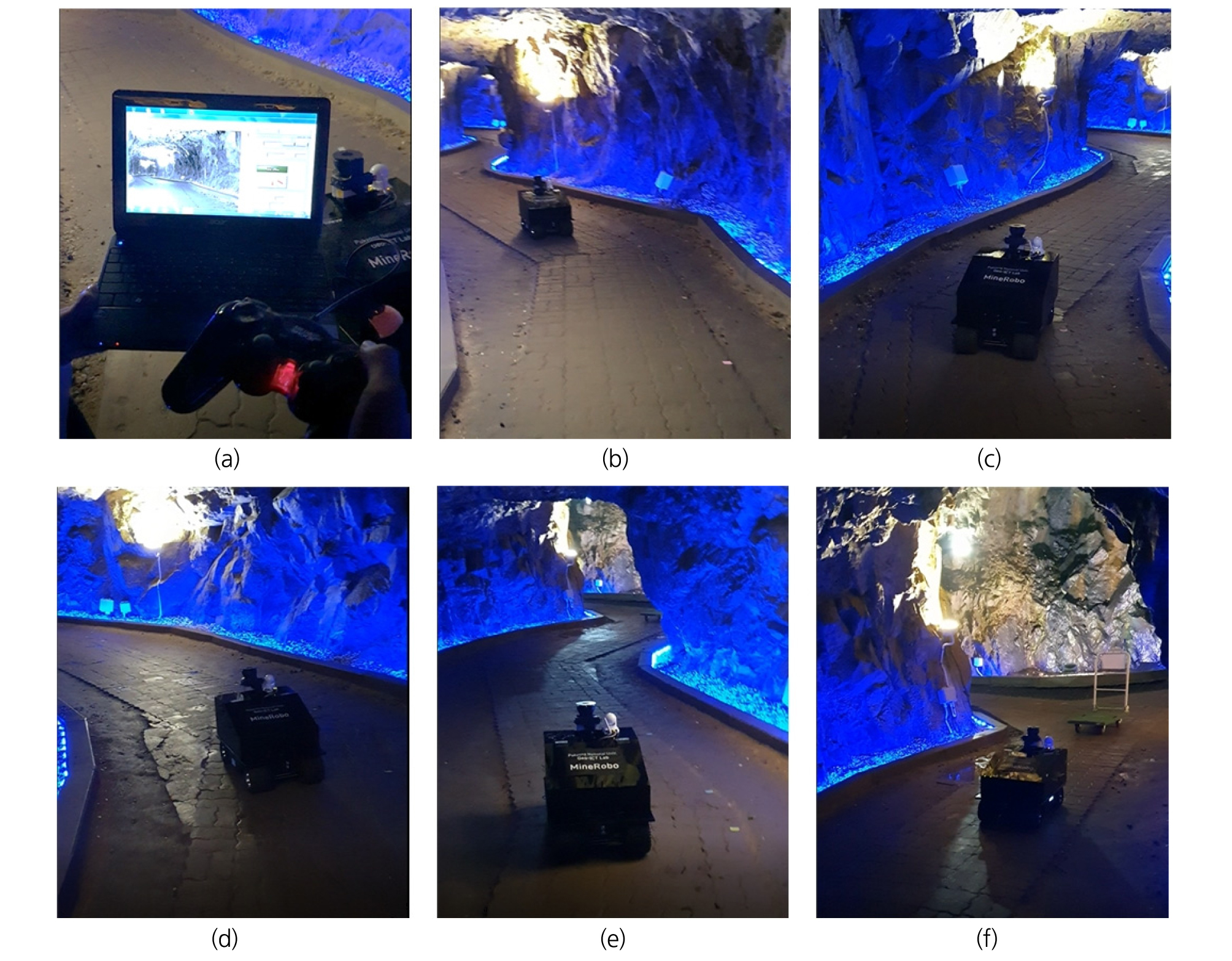
Fig. 7은 총 5회의 자율주행 실험 결과를 보여준다. 5회의 반복 실험 동안 자율주행 로봇은 거의 일정한 경로를 따라 주행하였다. 자율주행 로봇은 좌, 우측 벽면의 거리를 측정하여 도로의 중앙지점을 따라서 이동하였으며, 4곳의 곡선 지점에서도 벽면의 곡률에 맞추어 조향을 제어하였다. 도착지점에서는 블루투스 비콘의 신호를 수신하여 자동으로 정지하였다.
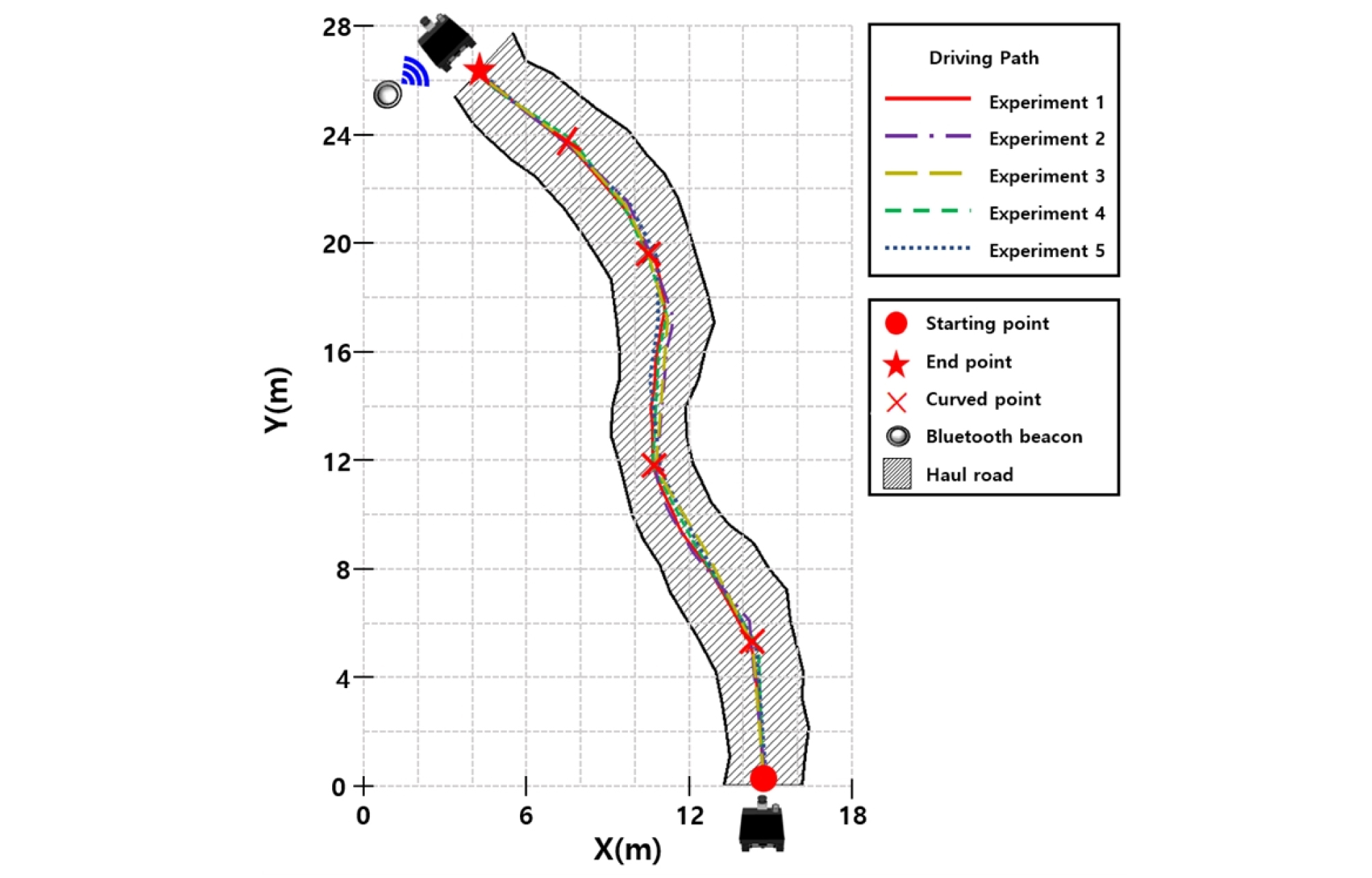
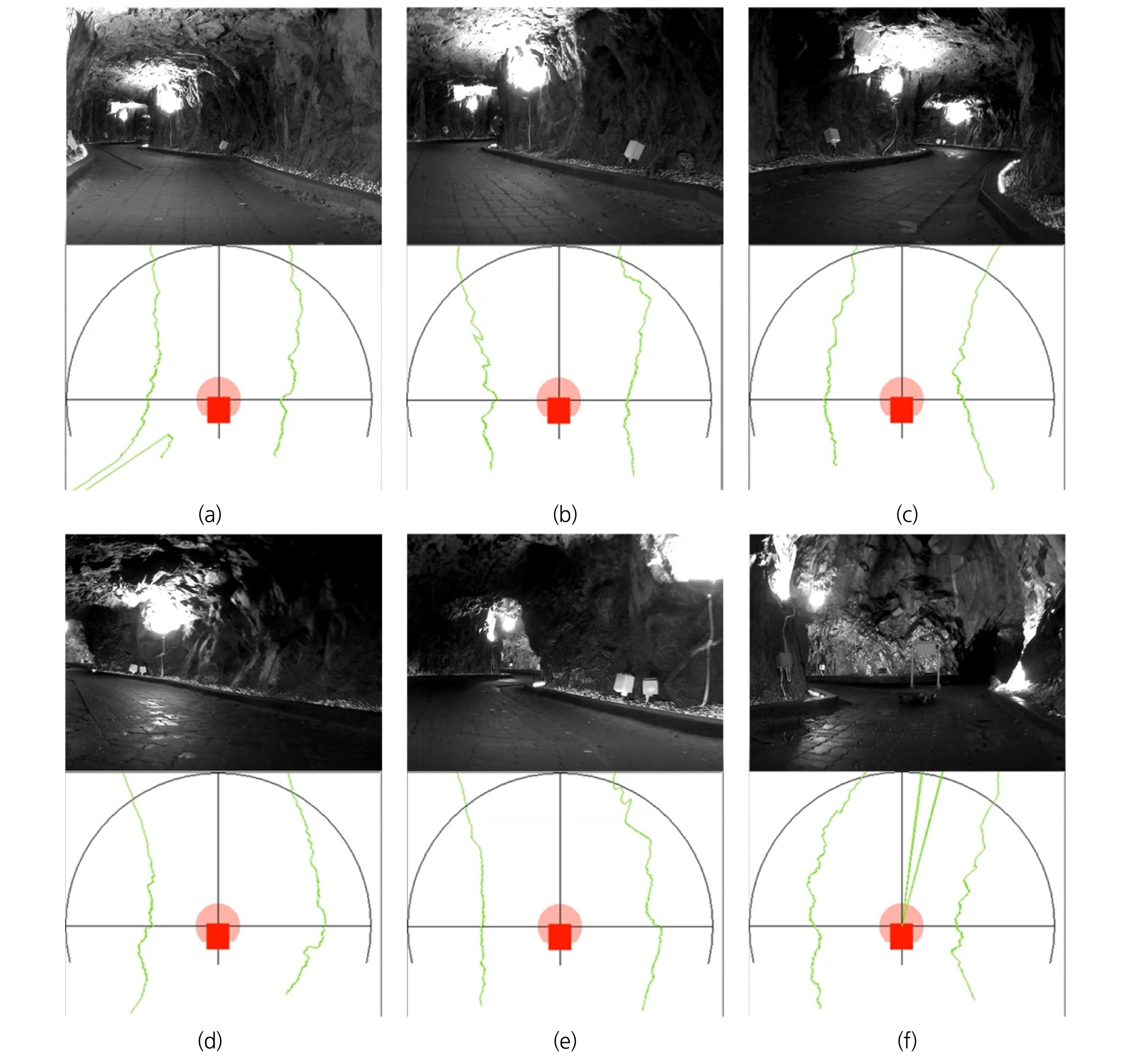
Fig. 8은 자율주행 로봇이 주행하는 동안 녹화된 웹캠 영상과 라이다 센서를 통해 측정된 갱도의 벽면을 보여준다. 웹캠 영상에서는 로봇의 진행 방향에 따라 도로 환경을 확인할 수 있었으며, 출발지점에 있는 원격 컨트롤러를 통해서도 로봇의 이동을 확인할 수 있었다. 라이다 센서를 통해 만들어진 갱도의 벽면은 수평 270° 지역을 0.25° 단위로 측정하였기 때문에 세밀하게 측정된 것을 확인할 수 있었다. 또한, 라이다 센서의 경우 광원의 세기와 관계없이 안정적인 성능을 나타내기 때문에 일부 어두운 지역에서도 효율적으로 활용될 수 있었다. 로봇이 주행하는 동안 라이다 센서를 통해 벽면의 형태가 연속적으로 측정되기 때문에 획득되는 데이터를 기록한 후 하나의 이미지로 병합한다면 지하갱도에 대한 2차원 지도를 제작할 수 있을 것이라 기대한다.
5. 결 론
본 연구에서는 라이다 센서를 이용하여 지하광산에서 활용될 수 있는 자율주행 로봇을 개발하였다. 개발된 자율주행 로봇은 라이다 센서를 통해서 좌, 우 벽면까지의 거리를 측정하고 거리 차이에 따라 로봇의 조향을 제어하여 도로 중앙지점을 따라 이동할 수 있도록 설계하였다. 목적지에서는 블루투스 비콘의 신호를 인식하여 자동으로 로봇이 정지할 수 있었다. 또한, 자율주행 로봇이 주행하는 동안 라이다 센서를 통해 측정되는 거리 데이터를 가시화하여 전반적인 벽면의 형태를 확인할 수 있었다.
기존에 수행된 연구에서는 자율주행 로봇을 활용하여 지하광산 환경을 모사한 실내 실험을 수행하였다. 그러나 지하광산 환경의 경우 도로의 형태가 일정하게 변하지 않으며, 갱도 벽면 또한 거칠어서 실내 실험장과는 환경적인 차이가 있었다. 본 연구에서는 라이다 센서 기반의 자율주행 로봇을 활용하여 실제 지하광산 환경에서 주행 실험을 수행하였고, 그 결과 전체 구간에서 안정적인 성능을 확인할 수 있었다. 또, 실험을 수행하기 사전 테스트를 통해 임계값들을 재설정하였기 때문에, 곡선 지점에서도 안정적으로 주행할 수 있었다.
본 연구에서 사용한 2D 라이다 센서의 경우 특정한 높이(60cm)에서 수평 방향으로의 거리만을 측정할 수 있으므로 라이다의 탐지 높이보다 낮은 곳에 있는 장애물을 인식할 수 없으며, 도로의 바닥 면에서 발생할 수 있는 굴곡이나 구덩이 등을 인식할 수 없다. 이를 극복하기 위해서는 라이다 센서를 통한 벽면 인식뿐만 아니라, 비전 카메라(vision camera)와 같은 넓은 범위의 환경 인식 센서를 활용하여 전반적인 도로의 상태를 인식할 수 있어야 한다.
자율주행 로봇은 라이다 센서에서 벽면의 형태를 연속적으로 측정할 수 있으므로 로봇이 주행하는 동안 지도를 생성하면서 위치를 인식할 수 있는 SLAM(Simultaneous localization and mapping) 기술과 함께 활용될 경우 자율주행 기술을 더욱더 높은 수준으로 구현할 수 있다. 또, 본 연구에서는 전체 지하광산 갱도 중 교차로가 없는 직선 구간만을 대상으로 하여 주행 실험을 수행하였다. 그러나 실제 지하광산 환경의 경우 파쇄장이나 선광장으로 향하는 경로가 여러 방향으로 구성되어 있으므로 교차로 이후의 길에서 최종 목적지까지 주행할 수 있는 경로 분석 알고리즘에 관한 추가적인 연구가 필요할 것이다.
